
Blog
20 Sep 2024
Exoskeleton: Redefining the limits of human capability
Imagine slipping into the high-tech suit of Tony Stark aka Iron Man and gaining superhuman powers – a science fiction vision that fascinates and inspires us. Exoskeletons may not (yet) reach the level of Tony Stark’s technology, but they are no longer just a fantasy.
The diversity of exoskeletons is reflected in their adaptability: they are customised to the needs and requirements of the respective user. These devices support individuals during physical exertion, aid in rehabilitation and are increasingly being integrated into industrial applications, as well as playing a significant role in military and civil defence.
Exoskeletons will redefine our understanding of human performance. They offer enormous potential, particularly in critical mission scenarios, allowing users to enhance their capabilities while minimising physical stress.
Origins of the exoskeleton
Definition of the exoskeleton
An exoskeleton is a ‘device worn on the body (with an electronic drive) that supports or replaces movements of the body (e.g. for paralysed people) or supports the lifting of heavy loads on the body’1. Sometimes also referred to as ‘wearable robots’, exoskeletons are both active models based on batteries, motors or hydraulic systems and passive variants that work with springs and dampers.
Origin of the exoskeleton
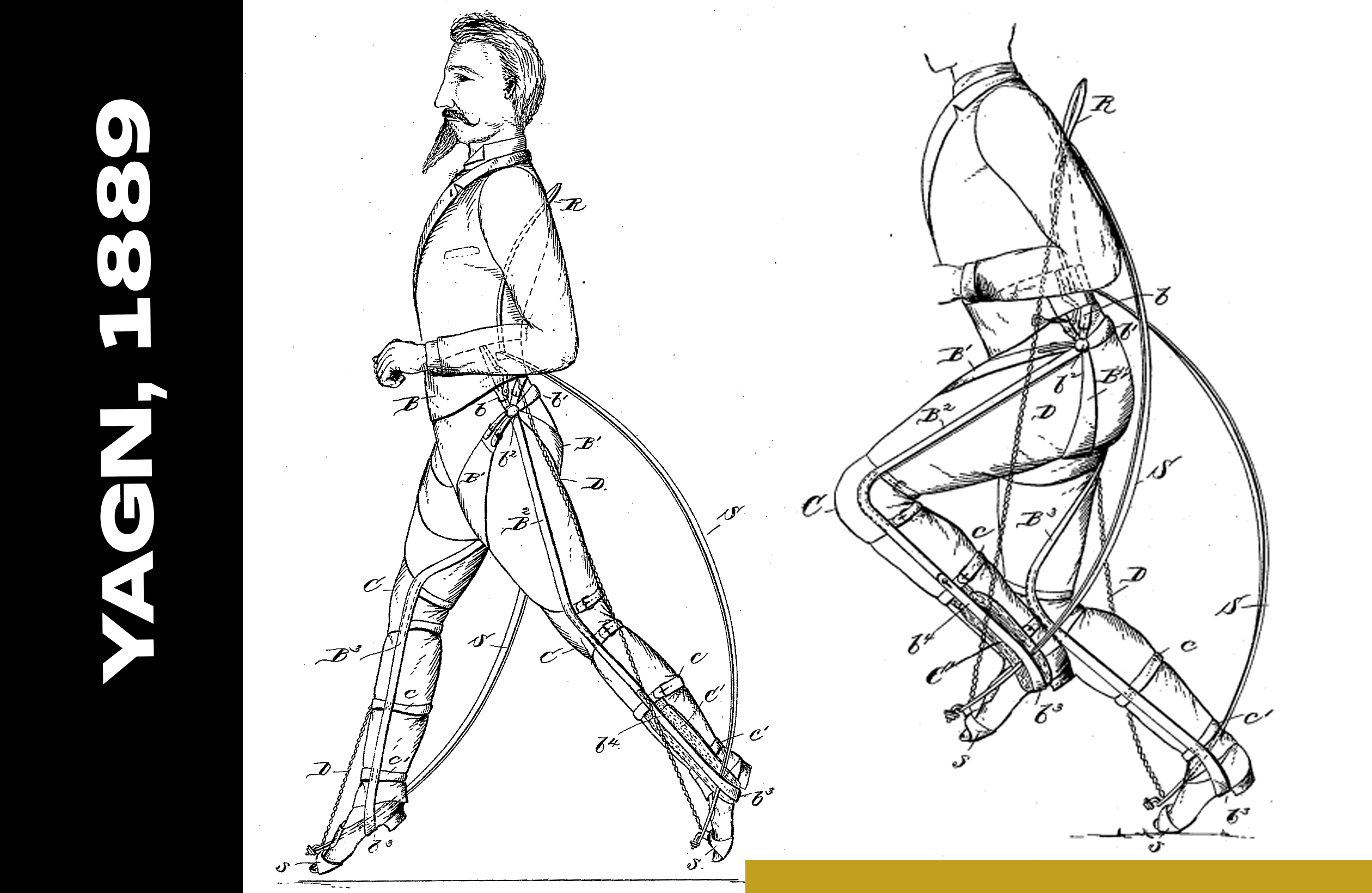
Long before the term exoskeleton was coined, in 1889, scientist Nicholas Yagn developed two patented devices to support the wearer during medical rehabilitation. These devices facilitated walking, running and, after further development, even jumping2. These purely mechanical systems are among the earliest designs to improve human performance while being worn and thus slow down the wearer’s fatigue. They relied on springs to facilitate the redistribution of energy from the wearer to movement. Yagn’s experiments laid the groundwork for the ongoing development of today’s exoskeletons.
Further development of exoskeletons
The 1960s marked a significant turning point in the development of exoskeletons. A notable example from this era is the ‘Hardiman I’, developed in 1965 by Neil J. Mizen of General Electric in collaboration with the US Army and Navy. This full-body exoskeleton was designed to significantly increase the strength and endurance of the wearer through the use of hydraulic and electrical systems, making it the first of its kind to move away from a purely mechanical function3. Its primary purpose of this model was to support the wearer when loading and unloading cargo.
Alongside ‘Hardiman I’, another full-body exoskeleton was patented in 1969 that utilised servo motors to assist the wearer’s movements4. Known as the ‘Man Amplifier’, this device illustrated the evolving definition of ‘exoskeleton’ and associated technologies.

These early models highlighted the shift in design and functionality that would be driven by advances in science and technology over the following decades. The key developments that laid the foundation for modern exoskeletons used in a variety of settings occurred primarily between the early 1970s and the 1990s.
The early 1990s saw the development of the Human Bipedal Locomotion Device, which was specifically designed to support the lower limbs and powered by mechanical systems5. This exoskeleton enabled users to take large steps and perform trampoline-like jumps. Another significant model from this period is the Boldt hydraulic active exoskeleton, which was patented in 1994 and is characterised by modern technologies such as microprocessor control.
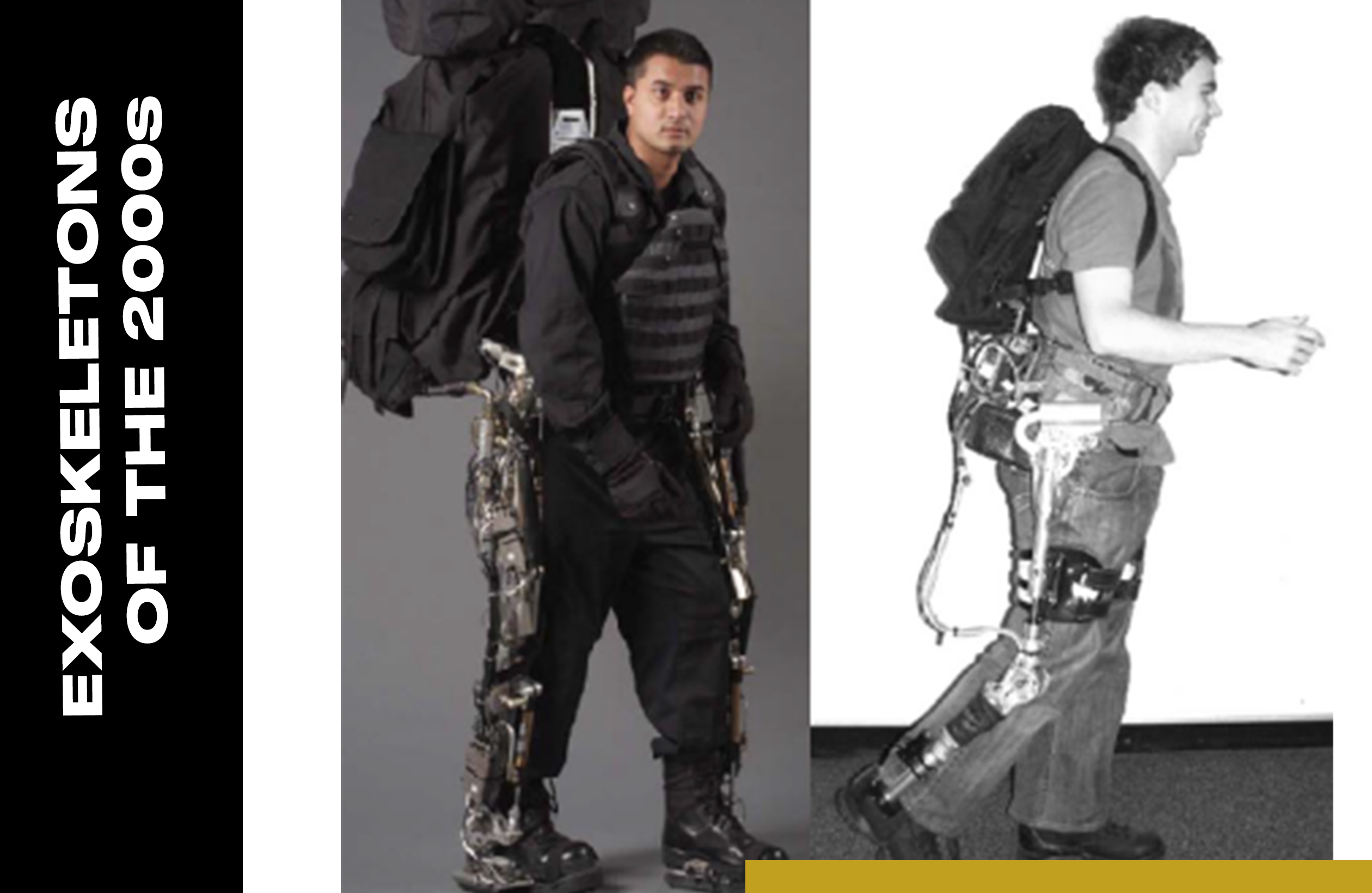
The 21st century has seen remarkable advances, including the Berkeley Lower Extremity Exoskeleton (BLEEX, figure left) and Conor Walsh’s (figure right) ‘quasi-passive exoskeleton’6. The BLEEX supports the carrying of loads with hydraulic actuators, while Walsh’s exoskeleton utilises mechanical systems. Rehabilitation technology has also progressed, such as the 2008 ‘ARMin III’ for arm therapy and the 2010 wrist exoskeleton controlled by EMG signals8.
These developments illustrate the transition from simple mechanical devices to more complex, technologically advanced exoskeletons that are being used for a variety of applications, including rehabilitation.
Use of exoskeletons for military and law enforcement personnel
Exoskeletons were initially developed for the medical sector to assist people with mobility impairments. In rehabilitation, they play a vital role in helping patients regain strength and mobility after an accident or illness. However, advances in technology have expanded the applications of exoskeletons beyond their medical origins. They are increasingly being used in the defence and security sectors, where they can significantly improve the physical performance and endurance of the user.
Operators are often exposed to extreme stress during their missions, including heavy backpacks and equipment, long marches through difficult terrain, and demanding physical tasks in conflict situations. In this context, exoskeletons offer critical advantages by helping users manage these stresses and significantly reducing the risk of injury, particularly to the back.
Improved performance and endurance in the field
Advanced exoskeletons improve physical performance, endurance and protection. They reduce the burden of carrying heavy equipment, enabling emergency personnel to work efficiently for longer periods of time while minimising fatigue. This is especially important during extended operations, where personnel may be active for hours or even days without rest.
Mechanical support not only reduces physical effort but also optimises mobility. This results in greater efficiency and faster reaction times during operations. The exoskeleton acts as an extension of the body, allowing users to perform in extreme situations without exceeding their physical limits.
Protection and safety in critical situations
A difference between military and civilian exoskeletons is the integration of ballistic protection. While industrial and logistical exoskeletons focus primarily on providing support for heavy-duty tasks, those designed for critical missions also offer additional protection. Ballistic elements – both hard and soft – integrated into the exoskeleton enhance protection of vital areas against various threats, including firearms and shrapnel, without placing undue stress on the wearer.

In this way, the exoskeleton serves as a multi-functional tool that enhances physical performance while ensuring the safety of emergency personnel in life-threatening situations. Additional protective components can be tailored to meet higher standards of protection.
Future prospects: enhancing protection and performance for operators
As technology advances and the demand for innovative solutions to support military and law enforcement personnel grows, the use of exoskeletons in operational scenarios will increase. These devices will not only enhance the physical performance of users, but also improve their safety and survivability in dangerous situations.
In the future, exoskeletons may become a standard part of operational equipment, as they can increase efficiency and help reduce medical treatment costs associated with injuries. They also open up new strategic opportunities, enabling emergency services to operate longer and more effectively.
Whole-body exoskeletons
Whole-body exoskeletons enable military and law enforcement personnel to carry heavy equipment for extended periods without fatigue. These systems distribute the load evenly across the body, reducing physical stress. Some models are specifically designed to assist with supply transport or evacuation, allowing responders to lift heavy loads without compromising mobility.

Exoskeletons for specific body parts
Specialised exoskeletons that support specific parts of the body can be used to address specific injuries or aid rehabilitation. For example, devices that relieve pressure on the knee joint can help restore mobility after an injury, speeding up the return to work. Such exoskeletons could also be beneficial during training, protecting users from overexertion or injury.
The implementation of exoskeletons clearly demonstrates their potential to improve physical performance, reduce fatigue and minimise the burden of heavy equipment. These developments could lead to more efficient, resilient and protected forces in the field.
Summary
The development of exoskeletons represents remarkable progress, from early mechanical concepts to today’s high-tech solutions. Their application in critical situations offers promising prospects for the future. Exoskeletons allow operators to overcome physical limitations while providing essential protection. As a result, they could become a key component of modern security strategies in the coming years.
In collaboration with Mawashi Science & Technology, a leading institute in exoskeleton development, as well as GIGN, an elite tactical unit of the French Gendarmerie, and Mehler Protection, the ground-breaking ExoM Up-Armoured Exoskeleton has been developed.
Explore more: ExoM Up-Armoured Exoskeleton
Sources
- 1Digitales Wörterbuch der deutschen Sprache (URL: https://www.dwds.de/wb/Exoskelett, getrieved on 06.09.2024.)
- 2Yagn, 1889 (Nicholas Yagn. Apparatus to facilitate walking and running, 1889.)
- 3Makinson, 1971 (B. J. Makinson. Research and Development Prototype for Machine Augmentation of Human Strength and Endurance. Hardiman I Project. Technical Report 196, General Electric, 1971.)
- 4Mizen, 1969 (Neil J. Mizen. POWERED EXOSKELETON APPARATUS FOR AMPLIFYING HUMAN STRENGTH IN RESPONSE TO NORMAL BODY MOVEMENTS, 1969.)
- 5Dick and Edwards, 1991 (G. John Dick and Eric A. Edwards. HUMAN BIPEDAL LOCOMOTION DEVICE, 1991.)
- 6Zoss et al., 2005 (Adam Zoss, H. Kazerooni, and Andrew Chu. On the mechanical design of the Berkeley Lower Extremity Exoskeleton (BLEEX). 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS, pages 3132–3139, 2005.)
- 7Nef et al., 2009 (Tobias Nef, Marco Guidali, and Robert Riener. ARMin III – arm therapy exoskeleton with an ergonomic shoulder actuation. Applied Bionics and Biomechanics, 6(2):127–142, jul 2009.)
- 8Khokhar et al., 2010 (Zeeshan O. Khokhar, Zhen G. Xiao, and Carlo Menon. Surface EMG pattern recognition for real-time control of a wrist exoskeleton. BioMedical Engineering OnLine, 9(1):41, 2010.)
Images and graphics
- Mehler Protection, Mehler Vario System GmbH (All rights reserved, 2024)
- Mizen, 1969 (Neil J. Mizen. POWERED EXOSKELETON APPARATUS FOR AMPLIFYING HUMAN STRENGTH IN RESPONSE TO NORMAL BODY MOVEMENTS, 1969.)
- Yagn, 1889 (Nicholas Yagn. Apparatus to facilitate walking and running, 1889.)

